TRL 2

Multi-Agent Path Execution with Uncertainty
- Optimised Task Prioritisation
- Dynamic Path Planning
- Large-Scale Deployability
TRL 7

A Novel Graph Optimisation Approach to Localisation (GOAL) with Application for Unmanned Systems
- High-precision Positioning
- Reliability in Non-Line-Of-Sight Operations
- AI-Powered Intelligence
TRL 4

Visual Connectivity Preserving Devices and Methods for Cooperative Ground Robots in Unknown Obstacle Environments
- Continuous Target Tracking
- 360° Obstacle Avoidance
- Better Robot Coordination
TRL 7
Non-iterative Simultaneous Localisation and Mapping (NI-SLAM)
- Real-Time SLAM
- Efficient System
- Accurate 3D Mapping
TRL 7

High-Fidelity Teleoperation for Diverse Vehicles and Machines
- Real-Time Responsiveness
- Immersive Experience
- Flexible Connectivity
TRL 4

Fast Semantic Aware Motion State Detection for Visual SLAM in Dynamic Environment
- Accurate Localisation
- Navigation Accuracy
- High Efficiency
TRL 3
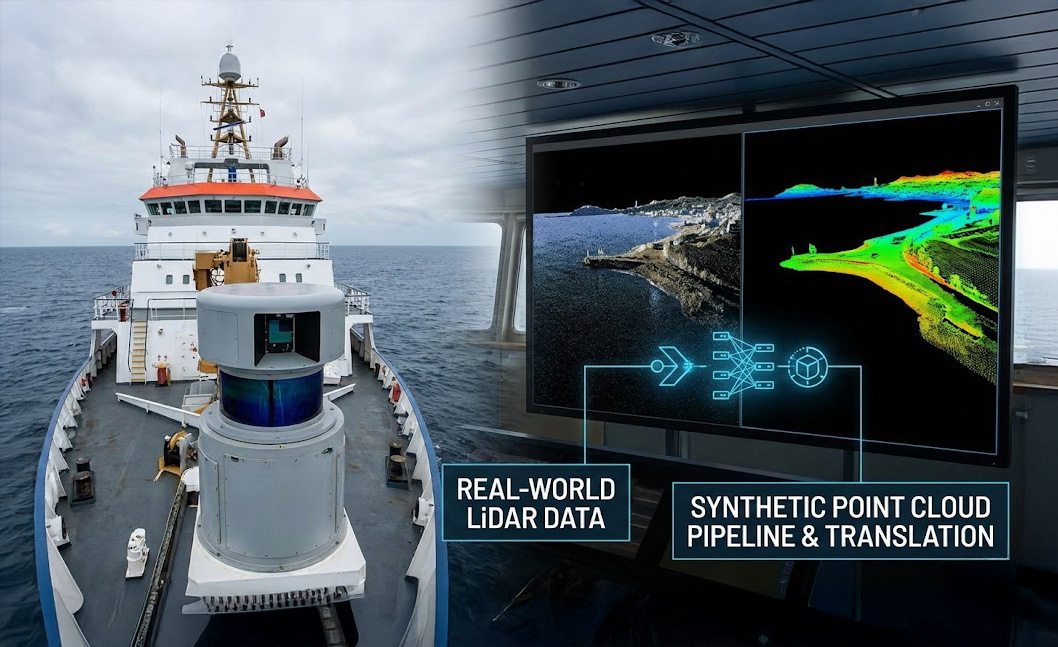
Collection and Transfer of Synthetic Point Cloud for the Understanding of LiDAR Point Cloud
- Large Dataset
- Realistic Data Conversion
- Smart AI Training
TRL 3

A Computer Vision Sensor for Efficient Real-Time Object Detection Under Varying Lighting Conditions
- Real-Time Object Recognition
- Cost-Effective
- Robust Computer Vision
TRL 6

3D LiDAR Based Autonomous Navigation and Collision Avoidance for Autonomous Mobile Robots
- High-Precision
- Real-Time Performance
- Flexible & Infrastructure-Free