 Vessel Performance & Navigation
Vessel Performance & Navigation 
Maritime Use Cases

The precise localization technology could be integrated into autonomous or remotely operated maritime vehicles, such as USVs, AUVs, and ROVs, to improve their navigational accuracy and positioning capabilities, particularly in areas with limited or unreliable GPS coverage.
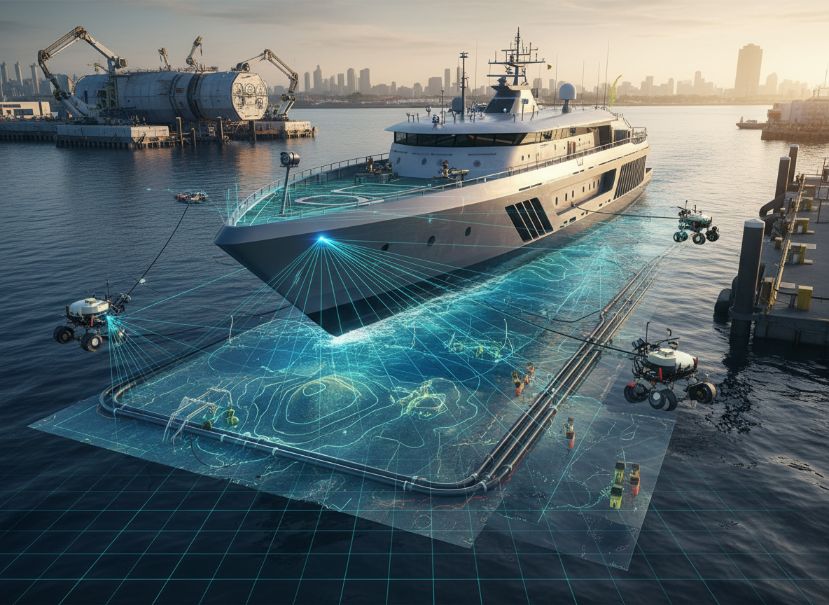
Accurate positioning is crucial for a wide range of maritime applications, including autonomous navigation, docking and berthing, underwater infrastructure mapping, and seafloor exploration.

The localization system could be combined with other sensor technologies, such as LiDAR, sonar, or inertial measurement units, to provide a comprehensive and redundant positioning solution for maritime autonomous systems.
related products
-

High-Fidelity Teleoperation for Diverse Vehicles and Machines
$0.00 Add to Cart -

Fast Semantic Aware Motion State Detection for Visual SLAM in Dynamic Environment
$0.00 Add to Cart -

3D LiDAR Based Autonomous Navigation and Collision Avoidance for Autonomous Mobile Robots
$0.00 Add to Cart -

Flexible Graphical User Interface for AGV Fleet Management Simulation Software
$0.00 Add to Cart